Einleitung
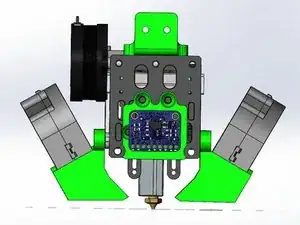
Du brauchst einen gedruckten Adapter um ADXL345 auf der Rückseite des X-Trägers zu befestigen. Hier findest du einen here
Ersatzteile
-
-
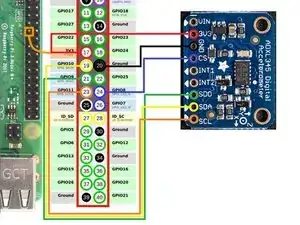
Verbinde den Beschleunigungssensor mit dem RPI
-
Beschleunigungssensor 3V3 an Pin 17 3.3V des RPI
-
Beschleunigungssensor GND an Pin 20 Masse des RPI
-
Beschleunigungssensor CS 21 an Pin GPIO08 des RPI (SPI0_CE0_N)
-
Beschleunigungssensor SDO 21 an Pin GPIO09 des RPI (SPI0_MISO)
-
Beschleunigungssensor SDA an Pin 19 GPIO10 des RPI (SPI0_MOSI)
-
Beschleunigungssensor SCL 23 an Pin GPIO11 des RPI (SPI0_SCLK)
-
-
-
Es gibt verschiedene Möglichkeiten den Beschleunigungssensor zu befestigen. I habe diese Befestigung benutzt.
-
-
-
Du musst dich über SSH mit deinem Drucker verbinden und Numby installieren.
-
~/klippy-env/bin/pip install -v numpy
-
sudo apt update
-
sudo apt install python3-numpy python3-matplotlib -y
-
Stelle sicher, dass der Linuxs SPI Treiber aktiviert ist.
-
sudo raspi-config
-
#3 Interface Options > P4 SPI > Ja > OK > Fertig
-
-
-
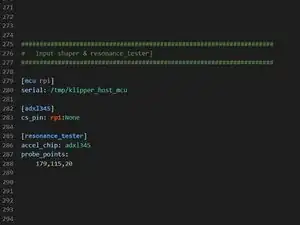
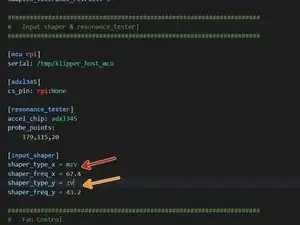
Kommentiere den Bereich input shaper & resonance tester in der Konfiguration aus.
-
probe_points: Es ist empfehlenswert einen Punkt in der Mitte des Betts und etwas darüber auszuwählen. Ich habe dieselben Koordinaten gewählt um Z zu "homen".
-
klipper neu starten mit
-
RESTART
-
-
-
Stelle sicher, dass das RPI mit den ADXL345 kommunizieren kann, indem Du folgenden Befehl eingibst:
-
ACCELEROMETER_QUERY
-
Es sollte etwas ähnliches ausgegeben werden, wie:
-
adxl345 values (x, y, z): -152.983740, 10249.910580, 152.983740
-
-
-
Fahren den Drucker in Grundstellung.
-
Während des Schwingungs-Tests können die Vibrationen recht heftig werden. Bleibe in der Nähe des Druckers, falls Du den Test mit M112 beenden musst.
-
Jetzt kannst Du den ersten Schwingungstest für X machen.
-
TEST_RESONANCES AXIS=X
-
Wenn der Test für X abgeschlossen ist, starte ihn erneut für Y.
-
TEST_RESONANCES AXIS=Y
-
Wenn der Test abgeschlossen ist, wird er CSV-Dateien erstellen und auf dem pi speichern.
-
-
-
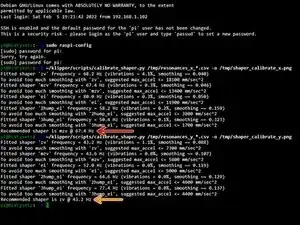
Verbinde dich über SSH mit deinem Drucker und führen die beiden folgenden Befehle aus
-
~/klipper/scripts/calibrate_shaper.py /tmp/resonances_x_*.csv -o /tmp/shaper_calibrate_x.png
-
~/klipper/scripts/calibrate_shaper.py /tmp/resonances_y_*.csv -o /tmp/shaper_calibrate_y.png
-
Dieses Skript erstellt die Übersichten /tmp/shaper_calibrate_x.png und /tmp/shaper_calibrate_y.png mit Frequenzergebnissen.
-
Du wirst dort die empfohlenen Frequenzen sehen für jeden input shaper, und auch welche input shaper für dich empfohlen werden.
-
Hier siehst Du meine Werte für X
-
Hier siehst Du meine Werte für Y
-
-
-
Mit CoreXY kannst Du Klipper auch dazu benutzen um die Riemenspannung zwischen X und Y zu vergleichen. Es sagt dir nicht ob die Riemenspannung zu hoch oder zu niedrig ist. Es zeigt dir, ob die Riemenspannung gleichmäßig ist.
-
Führe folgende Befehle in der Konsole aus
-
TEST_RESONANCES AXIS=1,1 OUTPUT=raw_data
-
TEST_RESONANCES AXIS=1,-1 OUTPUT=raw_data
-
Verbinde dich über SSH mit einem pi und führe folgenden Befehl aus
-
~/klipper/scripts/graph_accelerometer.py -c /tmp/raw_data_axis*.csv -o /tmp/resonances.png
-
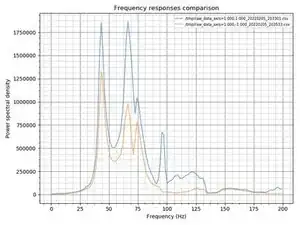
Gemäß der erstellen Grafik, hat X höhere Frequenzen als Y. Ich musste den linken Riemenspanner fester anziehen um die Frequenzen näher aneinander zu bringen.
-
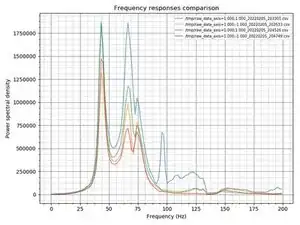
Wie Du beim 2. Test sehen kannst liegen die beiden Frequenzen nun näher beieinander, könnten aber trotzdem noch etwas Nachjustierung vertragen. Ich vermute, dass viele der Frequenzvariationen durch meine Kabelführung verursacht werden. Bei niedrigen Frequenzen knattert diese wesentlich mehr wenn ich X kalibriere.
-


2 Kommentare
Great Post! You might want to add a paragraph on the RPi Microcontroller for multi mcu with the pi
gary -
You may connect the ADXL345 to your Raspberry Pi Pico and then connect the Pico to your Raspberry Pi via USB.