Theoretische Physik 1 - Mechanik
Hinweis: Gesucht werden Autoren und Korrektoren
Fachbereich Physik
Fachbereich Physik
Theoretische Physik
Autor
Wolf (Student / wenig Zeit) Korrektoren
N.N.
Literaturempfehlung
Nolting - Theoretische Physik 1 Weiterentwicklung
Sporadisch
Mathematische Grundlagen
Die Einstein'sche Summenkonvention wurde 1916 von Einstein als Mathematische Grundlage zur Allgemeinen Relativitätstheorie vorgeschlagen und wird mittlerweile hauptsächlich in der theoretischen Physik verwendet. Sie besteht darin, das Summenzeichen wegzulassen und stattdessen über in Produkten doppelt auftretende Indizes zu summieren. Dadurch reduziert sich der Schreibaufwand. Man sollte nur stets im Hinterkopf behalten, dass es sich trotzdem um Summen handelt.
Beispiele:
(
a
→
,
b
→
)
=
∑
i
a
i
b
i
=
a
i
b
i
{\displaystyle ({\vec {a}},{\vec {b}})=\sum _{i}a_{i}b_{i}=a_{i}b_{i}}
(Standardskalarprodukt)
(
b
→
×
c
→
)
=
∑
j
,
k
ε
i
j
k
b
j
c
k
e
→
i
=
ε
i
j
k
b
j
c
k
e
→
i
{\displaystyle ({\vec {b}}\times {\vec {c}})=\sum _{j,k}\varepsilon _{ijk}b_{j}c_{k}{\vec {e}}_{i}=\varepsilon _{ijk}b_{j}c_{k}{\vec {e}}_{i}}
(Vektorprodukt)
a
→
⋅
(
b
→
×
c
→
)
=
∑
i
,
j
,
k
ε
i
j
k
a
i
b
j
c
k
=
ε
i
j
k
a
i
b
j
c
k
{\displaystyle {\vec {a}}\cdot ({\vec {b}}\times {\vec {c}})=\sum _{i,j,k}\varepsilon _{ijk}a_{i}b_{j}c_{k}=\varepsilon _{ijk}a_{i}b_{j}c_{k}}
(Spatprodukt)
Ein Tensor n.Stufe hat
3
n
{\displaystyle 3^{n}}
3
2
=
9
{\displaystyle 3^{2}=9}
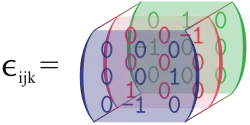
Definition
ε
i
j
k
…
:=
{
+
1
,
falls
(
i
,
j
,
k
,
…
)
eine gerade Permutation von
(
1
,
2
,
3
,
…
)
ist,
−
1
,
falls
(
i
,
j
,
k
,
…
)
eine ungerade Permutation von
(
1
,
2
,
3
,
…
)
ist,
0
,
wenn mindestens zwei Indizes gleich sind.
{\displaystyle \varepsilon _{ijk\dots }:={\begin{cases}+1,&{\mbox{falls }}(i,j,k,\dots ){\mbox{ eine gerade Permutation von }}(1,2,3,\dots ){\mbox{ ist,}}\\-1,&{\mbox{falls }}(i,j,k,\dots ){\mbox{ eine ungerade Permutation von }}(1,2,3,\dots ){\mbox{ ist,}}\\0,&{\mbox{wenn mindestens zwei Indizes gleich sind.}}\end{cases}}}
Levi-Civita-Symbol im R^3 Aber was heißt das?
Das Levi-Civita-Symbol ist ein invarianter, total antisymmetrischer (Pseudo-)Tensor n-ter Stufe.
Im
R
3
{\displaystyle \mathbb {R} ^{3}}
ε
i
j
k
=
e
→
i
(
e
→
j
×
e
→
k
)
{\displaystyle \varepsilon _{ijk}={\vec {e}}_{i}({\vec {e}}_{j}\times {\vec {e}}_{k})}
Daraus folgt:
a
→
(
b
→
×
c
→
)
=
a
i
e
→
i
(
b
j
e
→
j
×
c
k
e
→
k
)
=
a
i
b
j
c
k
e
→
i
(
e
→
j
×
e
→
k
)
=
∑
i
,
j
,
k
ε
i
j
k
a
i
b
j
c
k
=
ε
i
j
k
a
i
b
j
c
k
{\displaystyle {\vec {a}}({\vec {b}}\times {\vec {c}})=a_{i}{\vec {e}}_{i}(b_{j}{\vec {e}}_{j}\times c_{k}{\vec {e}}_{k})=a_{i}b_{j}c_{k}{\vec {e}}_{i}({\vec {e}}_{j}\times {\vec {e}}_{k})=\sum _{i,j,k}\varepsilon _{ijk}a_{i}b_{j}c_{k}=\varepsilon _{ijk}a_{i}b_{j}c_{k}}
ε
i
j
k
=
|
e
i
,
1
e
i
,
2
e
i
,
3
e
j
,
1
e
j
,
2
e
j
,
3
e
k
,
1
e
k
,
2
e
k
,
3
|
{\displaystyle \varepsilon _{ijk}={\begin{vmatrix}e_{i,1}&e_{i,2}&e_{i,3}\\e_{j,1}&e_{j,2}&e_{j,3}\\e_{k,1}&e_{k,2}&e_{k,3}\end{vmatrix}}}
Die Herleitung der Determinantenschreibweise ist als Übungsaufgabe aufgelistet, die Lösung steht dabei.
Beispiel im
R
3
{\displaystyle \mathbb {R} ^{3}}
Mit
e
→
1
,
e
→
2
,
e
→
3
{\displaystyle {\vec {e}}_{1},{\vec {e}}_{2},{\vec {e}}_{3}}
Gerade Permutation:
ε
123
=
|
1
0
0
0
1
0
0
0
1
|
=
(
1
⋅
1
⋅
1
)
+
(
0
⋅
0
⋅
0
)
+
(
0
⋅
0
⋅
0
)
−
(
(
0
⋅
1
⋅
0
)
+
(
0
⋅
0
⋅
1
)
+
(
1
⋅
0
⋅
0
)
)
=
1
{\displaystyle \varepsilon _{123}={\begin{vmatrix}1&0&0\\0&1&0\\0&0&1\end{vmatrix}}=(1\cdot 1\cdot 1)+(0\cdot 0\cdot 0)+(0\cdot 0\cdot 0)-((0\cdot 1\cdot 0)+(0\cdot 0\cdot 1)+(1\cdot 0\cdot 0))=1}
Ungerade Permutation:
ε
132
=
|
1
0
0
0
0
1
0
1
0
|
=
(
1
⋅
0
⋅
0
)
+
(
0
⋅
1
⋅
0
)
+
(
0
⋅
1
⋅
0
)
−
(
(
0
⋅
0
⋅
0
)
+
(
1
⋅
1
⋅
1
)
+
(
0
⋅
0
⋅
0
)
)
=
−
1
{\displaystyle \varepsilon _{132}={\begin{vmatrix}1&0&0\\0&0&1\\0&1&0\end{vmatrix}}=(1\cdot 0\cdot 0)+(0\cdot 1\cdot 0)+(0\cdot 1\cdot 0)-((0\cdot 0\cdot 0)+(1\cdot 1\cdot 1)+(0\cdot 0\cdot 0))=-1}
Zwei gleiche Indizes:
ε
113
=
|
1
1
0
0
0
0
0
0
1
|
=
(
1
⋅
0
⋅
1
)
+
(
1
⋅
0
⋅
0
)
+
(
0
⋅
0
⋅
0
)
−
(
(
0
⋅
0
⋅
0
)
+
(
0
⋅
0
⋅
1
)
+
(
1
⋅
1
⋅
0
)
)
=
0
{\displaystyle \varepsilon _{113}={\begin{vmatrix}1&1&0\\0&0&0\\0&0&1\end{vmatrix}}=(1\cdot 0\cdot 1)+(1\cdot 0\cdot 0)+(0\cdot 0\cdot 0)-((0\cdot 0\cdot 0)+(0\cdot 0\cdot 1)+(1\cdot 1\cdot 0))=0}
Kronecker-Delta
Das Kronecker-Delta
δ
i
j
{\displaystyle \!\,\delta _{ij}}
Tensor zweiter Stufe mit zwei Indizes, i und j. Es wird hauptsächlich in Summenformeln bei Vektor- und Matrizenrechnung verwendet.
Definition
δ
i
j
:=
{
1
falls
i
=
j
0
falls
i
≠
j
{\displaystyle \delta _{ij}:=\left\{{\begin{matrix}1&{\mbox{falls }}i=j\\0&{\mbox{falls }}i\neq j\end{matrix}}\right.}
Daraus folgt im dreidimensionalem euklidischem Raum mit den Einheitsvektoren
e
→
i
,
e
→
j
{\displaystyle {\vec {e}}_{i},{\vec {e}}_{j}}
δ
i
j
=
e
→
i
⋅
e
→
j
{\displaystyle \delta _{ij}={\vec {e}}_{i}\cdot {\vec {e}}_{j}}
Beispiel
e
→
1
=
(
1
0
0
)
,
e
→
2
=
(
0
1
0
)
{\displaystyle {\vec {e}}_{1}={\begin{pmatrix}1\\0\\0\end{pmatrix}},{\vec {e}}_{2}={\begin{pmatrix}0\\1\\0\end{pmatrix}}}
für
i
=
j
=
1
{\displaystyle \!\,i=j=1}
δ
11
=
e
→
1
⋅
e
→
1
=
(
1
⋅
1
+
0
⋅
0
+
0
⋅
0
)
=
1
{\displaystyle \delta _{11}={\vec {e}}_{1}\cdot {\vec {e}}_{1}=(1\cdot 1+0\cdot 0+0\cdot 0)=1}
für
i
≠
j
{\displaystyle i\neq j}
i
=
1
,
j
=
2
{\displaystyle \!\,i=1,j=2}
δ
12
=
e
→
1
⋅
e
→
2
=
(
1
⋅
0
+
0
⋅
1
+
0
⋅
0
)
=
0
{\displaystyle \delta _{12}={\vec {e}}_{1}\cdot {\vec {e}}_{2}=(1\cdot 0+0\cdot 1+0\cdot 0)=0}
Levi-Civita-und Kronecker-Delta
Hinweis: Da die Übungsaufgaben aufeinander aufbauen, bietet es sich an sie in der Reihenfolge
zu bearbeiten.
1.) Zeige:
ε
i
j
k
=
d
e
t
(
e
→
i
,
e
→
j
,
e
→
k
)
{\displaystyle \varepsilon _{ijk}=det({\vec {e}}_{i},{\vec {e}}_{j},{\vec {e}}_{k})}
Lösung
2.) Zeige:
ε
i
j
k
ε
i
l
m
=
δ
j
l
δ
k
m
−
δ
j
m
δ
k
l
{\displaystyle \varepsilon _{ijk}\varepsilon _{ilm}=\delta _{jl}\delta _{km}-\delta _{jm}\delta _{kl}}
Lösung
3.) Zeige:
c
→
(
a
→
×
b
→
)
=
a
→
(
b
→
×
c
→
)
=
b
→
(
c
→
×
a
→
)
{\displaystyle {\vec {c}}({\vec {a}}\times {\vec {b}})={\vec {a}}({\vec {b}}\times {\vec {c}})={\vec {b}}({\vec {c}}\times {\vec {a}})}
Lösung
4.) Zeige:
a
→
×
(
b
→
×
c
→
)
=
b
→
(
a
→
,
c
→
)
−
c
→
(
a
→
,
b
→
)
{\displaystyle {\vec {a}}\times ({\vec {b}}\times {\vec {c}})={\vec {b}}({\vec {a}},{\vec {c}})-{\vec {c}}({\vec {a}},{\vec {b}})}
Lösung
5.) Zeige:
(
a
→
×
b
→
)
(
c
→
×
d
→
)
=
(
a
→
,
c
→
)
(
b
→
,
d
→
)
−
(
b
→
,
c
→
)
(
a
→
,
d
→
)
{\displaystyle ({\vec {a}}\times {\vec {b}})({\vec {c}}\times {\vec {d}})=({\vec {a}},{\vec {c}})({\vec {b}},{\vec {d}})-({\vec {b}},{\vec {c}})({\vec {a}},{\vec {d}})}
Lösung
6.) Zeige:
ε
i
j
k
ε
i
j
n
=
2
δ
k
n
{\displaystyle \varepsilon _{ijk}\varepsilon _{ijn}=2\delta _{kn}}
7.) Zeige:
ε
i
j
k
ε
i
j
k
=
6
{\displaystyle \varepsilon _{ijk}\varepsilon _{ijk}=6}
Differentialoperator
* Ein Differentialoperator ist kein Vektor im eigentlichen Sinne!
* Man kann Differentialoperatoren nicht kürzen oder mit ihnen erweitern!
* Existiert nur an Stellen, wo die Funktion nach allen Koordinaten stetig differenzierbar ist
* Satz von Schwarz für zweifach stetig differenzierbare Funktionen
Nabla
Der Nabla-Operator bildet die partiellen Ableitungen einer Funktion nach den verschiedenen Koordinaten.
∇
=
e
→
i
∂
∂
x
i
=
e
→
i
∇
i
=
(
∂
∂
x
1
⋮
∂
∂
x
n
)
{\displaystyle \nabla ={\vec {e}}_{i}{\frac {\partial }{\partial x_{i}}}={\vec {e}}_{i}\nabla _{i}={\begin{pmatrix}{\frac {\partial }{\partial x_{1}}}\\\vdots \\{\frac {\partial }{\partial x_{n}}}\end{pmatrix}}}
Gradient
Der Gradient
∇
φ
(
r
→
)
{\displaystyle \nabla \,\varphi ({\vec {r}})}
grad
φ
(
r
→
)
{\displaystyle \operatorname {grad} \varphi ({\vec {r}})}
φ
(
r
→
)
{\displaystyle \varphi ({\vec {r}})}
φ
(
r
→
)
{\displaystyle \varphi ({\vec {r}})}
Für ein Skalarfeld
φ
(
x
1
,
…
,
x
n
)
{\displaystyle \varphi (x_{1},\ldots ,x_{n})}
grad
φ
=
∇
φ
=
∇
i
φ
e
→
i
=
∂
φ
∂
x
i
e
→
i
=
(
∂
φ
∂
x
1
⋮
∂
φ
∂
x
n
)
{\displaystyle \operatorname {grad} \,\varphi =\nabla \varphi =\nabla _{i}\varphi {\vec {e}}_{i}={\frac {\partial \varphi }{\partial x_{i}}}{\vec {e}}_{i}={\begin{pmatrix}{\frac {\partial \varphi }{\partial x_{1}}}\\\vdots \\{\frac {\partial \varphi }{\partial x_{n}}}\end{pmatrix}}}
Divergenz
Im n-dimensionalem euklidischen Raum gilt:
div
A
→
(
r
→
)
=
∇
A
→
(
r
→
)
=
∑
i
n
∂
A
i
(
r
→
)
∂
x
i
=
∂
A
i
(
r
→
)
∂
x
i
=
∇
i
A
i
(
r
→
)
{\displaystyle \operatorname {div} \,{\vec {A}}({\vec {r}})=\nabla {\vec {A}}({\vec {r}})=\sum _{i}^{n}{\frac {\partial A_{i}({\vec {r}})}{\partial x_{i}}}={\frac {\partial A_{i}({\vec {r}})}{\partial x_{i}}}=\nabla _{i}A_{i}({\vec {r}})}
Im n-dimensionalem euklidischen Raum gilt:
rot
A
→
(
r
→
)
=
∇
×
A
→
(
r
→
)
=
ε
i
j
k
∇
i
A
j
(
r
→
)
e
→
k
{\displaystyle \operatorname {rot} \,{\vec {A}}({\vec {r}})=\nabla \times {\vec {A}}({\vec {r}})=\varepsilon _{ijk}\nabla _{i}A_{j}({\vec {r}}){\vec {e}}_{k}}
Für
R
3
{\displaystyle \mathbb {R} ^{3}}
r
o
t
A
→
(
r
→
)
=
∇
×
A
→
(
r
→
)
=
(
∂
A
3
(
r
→
)
∂
x
2
−
∂
A
2
(
r
→
)
∂
x
3
∂
A
1
(
r
→
)
∂
x
3
−
∂
A
3
(
r
→
)
∂
x
1
∂
A
2
(
r
→
)
∂
x
1
−
∂
A
1
(
r
→
)
∂
x
2
)
,
{\displaystyle \operatorname {rot\ } {\vec {A}}({\vec {r}})=\nabla \times {\vec {A}}({\vec {r}})={\begin{pmatrix}{\frac {\partial A_{3}({\vec {r}})}{\partial x_{2}}}-{\frac {\partial A_{2}({\vec {r}})}{\partial x_{3}}}\\{\frac {\partial A_{1}({\vec {r}})}{\partial x_{3}}}-{\frac {\partial A_{3}({\vec {r}})}{\partial x_{1}}}\\{\frac {\partial A_{2}({\vec {r}})}{\partial x_{1}}}-{\frac {\partial A_{1}({\vec {r}})}{\partial x_{2}}}\\\end{pmatrix}},}
Differentialoperatoren grad, div, rot
Hinweis: Alle Skalarfelder, Vektorfelder sind zweifach stetig differenzierbar.
1.) Zeige:
d
i
v
r
o
t
A
→
=
0
{\displaystyle \operatorname {div\ } \operatorname {rot\ } {\vec {A}}=0}
Lösung
2.) Zeige:
r
o
t
g
r
a
d
B
=
0
{\displaystyle \operatorname {rot\ } \operatorname {grad\ } B=0}
Lösung (noch nicht vorhanden)
3.) Zeige:
d
i
v
g
r
a
d
B
=
0
{\displaystyle \operatorname {div\ } \operatorname {grad\ } B=0}
Lösung (noch nicht vorhanden)
Verschiebung .
.
.
.
.
.
.
.
.
Drehung gegen den Uhrzeigersinn
.
.
.
.
.
.
.
.
.
.
Bewegung eines Massenpunktes
Literatur
Nolting - Grundkurs: Theoretische Physik (Klassische Mechanik) - ISBN 3-922410-18-9
Rebhan - Theoretische Physik: Mechanik - ISBN 3-8274-1716-3
Fließbach, Walliser - Arbeitsbuch zur Theoretischen Physik - ISBN 3-8274-1521-7