- Krümmung von bogenparametrisierten Kurven
Eine
differenzierbare Kurve
-
![{\displaystyle f\colon [a,b]\longrightarrow \mathbb {R} ^{n},\,t\longmapsto f(t)=\left(f_{1}(t),\,\ldots ,\,f_{n}(t)\right),}](../_assets_/eb734a37dd21ce173a46342d1cc64c92/3503a3512a42f5611451b78f41fd3f64ffdcfae8.svg)
heißt
bogenparametrisiert,
wenn
 für alle
für alle  gilt.
gilt.
Nach
Aufgabe 2.3
besitzt eine zweimal stetig differenzierbare bogenparametrisierte Kurve die Eigenschaft, dass die zweite Ableitung  stets senkrecht auf der ersten Ableitung
stets senkrecht auf der ersten Ableitung  steht.
steht.
Es sei
-

eine zweifach
stetig differenzierbare
Kurve
und
 .
Eine naheliegende Möglichkeiten, das Verhalten der Kurve im Punkt
bzw.
.
Eine naheliegende Möglichkeiten, das Verhalten der Kurve im Punkt
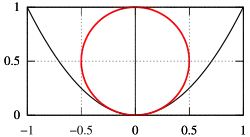
bzw.  über die Tangente hinaus zu approximieren besteht darin, einen Kreis anzugeben, der sich an die Kurve besonders gut anschmiegt, bzw. eine Kreisbewegung anzugeben, die bis zur zweiten Ableitung mit der Kurve übereinstimmt. Die Kurve sei
bogenparametrisiert.
über die Tangente hinaus zu approximieren besteht darin, einen Kreis anzugeben, der sich an die Kurve besonders gut anschmiegt, bzw. eine Kreisbewegung anzugeben, die bis zur zweiten Ableitung mit der Kurve übereinstimmt. Die Kurve sei
bogenparametrisiert.
Es sei
-
eine zweifach
stetig differenzierbare
bogenparametrisierte
Kurve
und
 .
Dann nennt man
.
Dann nennt man
-

die
Krümmung
der Kurve in  .
.
Statt Krümmungskreis sagt man auch Schmiegkreis. Da im bogenparametrisierten Fall
 und
und  senkrecht aufeinander stehen und die zweite Ableitung nicht
senkrecht aufeinander stehen und die zweite Ableitung nicht  ist, bilden diese Vektoren eine Basis des
ist, bilden diese Vektoren eine Basis des  und daher ist ihre Determinante, die ja als Nenner in der Definition des Krümmungskreises auftritt, nicht . Wenn diese Determinante
(und damit die Krümmung)
positiv ist, so repräsentiert diese Basis die
Standardorientierung
(also die Orientierung, die durch die Standardvektoren
und daher ist ihre Determinante, die ja als Nenner in der Definition des Krümmungskreises auftritt, nicht . Wenn diese Determinante
(und damit die Krümmung)
positiv ist, so repräsentiert diese Basis die
Standardorientierung
(also die Orientierung, die durch die Standardvektoren
 und
und  )
gegeben ist, andernfalls die Gegenorientierung. Bei positiver Krümmung wird die Bewegung
(von der tangentialen Richtung aus gesehen)
nach links abgelenkt, bei negativer Krümmung nach rechts. Bei positiver Krümmung kann man den Mittelpunkt des Krümmungskreises als
)
gegeben ist, andernfalls die Gegenorientierung. Bei positiver Krümmung wird die Bewegung
(von der tangentialen Richtung aus gesehen)
nach links abgelenkt, bei negativer Krümmung nach rechts. Bei positiver Krümmung kann man den Mittelpunkt des Krümmungskreises als
-

und bei negativer Krümmung als
-

beschreiben. Gemäß
Aufgabe 3.1
besitzt die umgekehrt durchlaufene Kurve die negierte Krümmung. Gelegentlich werden wir auch von der Krümmung der Kurve im Punkt
 sprechen, was bei einer Kurve, die injektiv ist oder allenfalls periodisch mehrfach durchlaufen wird, unproblematisch ist.
sprechen, was bei einer Kurve, die injektiv ist oder allenfalls periodisch mehrfach durchlaufen wird, unproblematisch ist.
Die Definition des Krümmungskreises kann man bereits dann verwenden, wenn  die Norm
die Norm  (also nur für )
besitzt, ohne dass eine bogenparametrisierte Kurve vorliegt, wenn man fordert, dass
und
linear unabhängig
sind. Wenn die beiden Vektoren linear abhängig sind, so sagt man auch, dass der Krümmungsradius unendlich ist.
(also nur für )
besitzt, ohne dass eine bogenparametrisierte Kurve vorliegt, wenn man fordert, dass
und
linear unabhängig
sind. Wenn die beiden Vektoren linear abhängig sind, so sagt man auch, dass der Krümmungsradius unendlich ist.
Es sei
-
eine zweifach
stetig differenzierbare
bogenparametrisierte
Kurve
und
mit
-

mit dem
Krümmungskreis
 mit Mittelpunkt
mit Mittelpunkt  und Radius
und Radius  . Wenn
. Wenn  die
Standardorientierung
repräsentiert, so sei
die
Standardorientierung
repräsentiert, so sei
 derart, dass
derart, dass
-

Wenn nicht die
Standardorientierung
repräsentiert, so sei
derart, dass
-

Dann ist
(im standardorientierten Fall)
-

bzw.
(im nichtstandardorientierten Fall)
-

eine bogenparametrisierte Bewegung auf dem Krümmungskreis, die in mit  bis zur zweiten Ableitung übereinstimmt.
bis zur zweiten Ableitung übereinstimmt.

Die folgende Aussage zeigt, dass man jeden gewünschten Krümmungsverlauf durch eine Kurve realisieren kann.
In der vorstehenden Aussage ist das Vorzeichen positiv, wenn die Kurve positiv gekrümmt ist, andernfalls negativ. Entscheidend ist nicht die explizite Beschreibung des Einheitsnormalenfeldes, sondern ob der Tangentenvektor und der Einheitsnormalenvektor die Standardorientierung repräsentiert oder nicht.
Wir erwähnen noch die folgende Definition.
- Krümmung von Kurven allgemein
Wir besprechen die Krümmung von ebenen Kurven, die nicht notwendigerweise bogenparametrisiert sind und von implizit gegebenen ebenen Kurven. Zu einer zweifach stetig differenzierbaren Kurve
-

mit
 für alle
und einem fixierten Punkt
für alle
und einem fixierten Punkt
 ist
ist
-

nach
Satz 38.6 (Analysis (Osnabrück 2021-2023))
die Bogenlänge von  zwischen
zwischen
 und .
Die Zuordnung
und .
Die Zuordnung
-

ist dabei streng wachsend und stetig differenzierbar. Es sei  das Bildintervall,
das Bildintervall,
 die Umkehrfunktion zu
die Umkehrfunktion zu  und
und
 .
Dann ist unter Verwendung von
Satz 18.10 (Analysis (Osnabrück 2021-2023))
und
Satz 24.3 (Analysis (Osnabrück 2021-2023))
.
Dann ist unter Verwendung von
Satz 18.10 (Analysis (Osnabrück 2021-2023))
und
Satz 24.3 (Analysis (Osnabrück 2021-2023))

was bedeutet, dass bogenparametrisiert ist. Den Übergang von zu nennt man Bogenparametrisierung, dabei wird die Bildkurve nicht geändert, nur die Geschwindigkeit, mit der sie durchlaufen wird. Es liegt das kommutative Diagramm
-

vor.
Wegen

stimmen die beiden Terme überein. Es sei
-

mit einer Umparametrisierung  und der bogenparametrisierten Kurve . Dann ist
und der bogenparametrisierten Kurve . Dann ist

Im Fall einer implizit gegebenen Kurve
 und einem Punkt
und einem Punkt
 schreiben wir auch
schreiben wir auch  statt
statt  , wenn eine Bogenparametrisierung der Kurve mit
, wenn eine Bogenparametrisierung der Kurve mit
 vorliegt.
vorliegt.
Es sei
 eine Bogenparametrisierung der Kurve
eine Bogenparametrisierung der Kurve  in einer Umgebung von
in einer Umgebung von  mit
mit
 ,
die mit der gegebenen Orientierung übereinstimmt. Das totale Differential
,
die mit der gegebenen Orientierung übereinstimmt. Das totale Differential
-

ist linear, daher genügt es, die Aussage für den Vektor  zu zeigen. Nach
der Kettenregel
ist
zu zeigen. Nach
der Kettenregel
ist
-

Dieser Vektor ist ein Vielfaches von und daher ist dies gleich
-

Wegen der Orthogonalitätsbedingung ist
-

für alle
und daher
-

Also ist
-

nach
Lemma 3.8.